




| 제목 | 답변완료 15 Two-Degree-of-Freedom Model (Undamped) (1) | ||
|---|---|---|---|
| 질문유형 | 강좌내용 | 교수님 | 권준표 |
| 과목 | 진동학 | 강좌명 | [진동학] 진동학 한방에 끝내기 (핵심) |
| 작성자 | 장*희 (n***********************f) | 등록일 | 2025-01-28 19:55 |
| 첨부파일 | |||
|
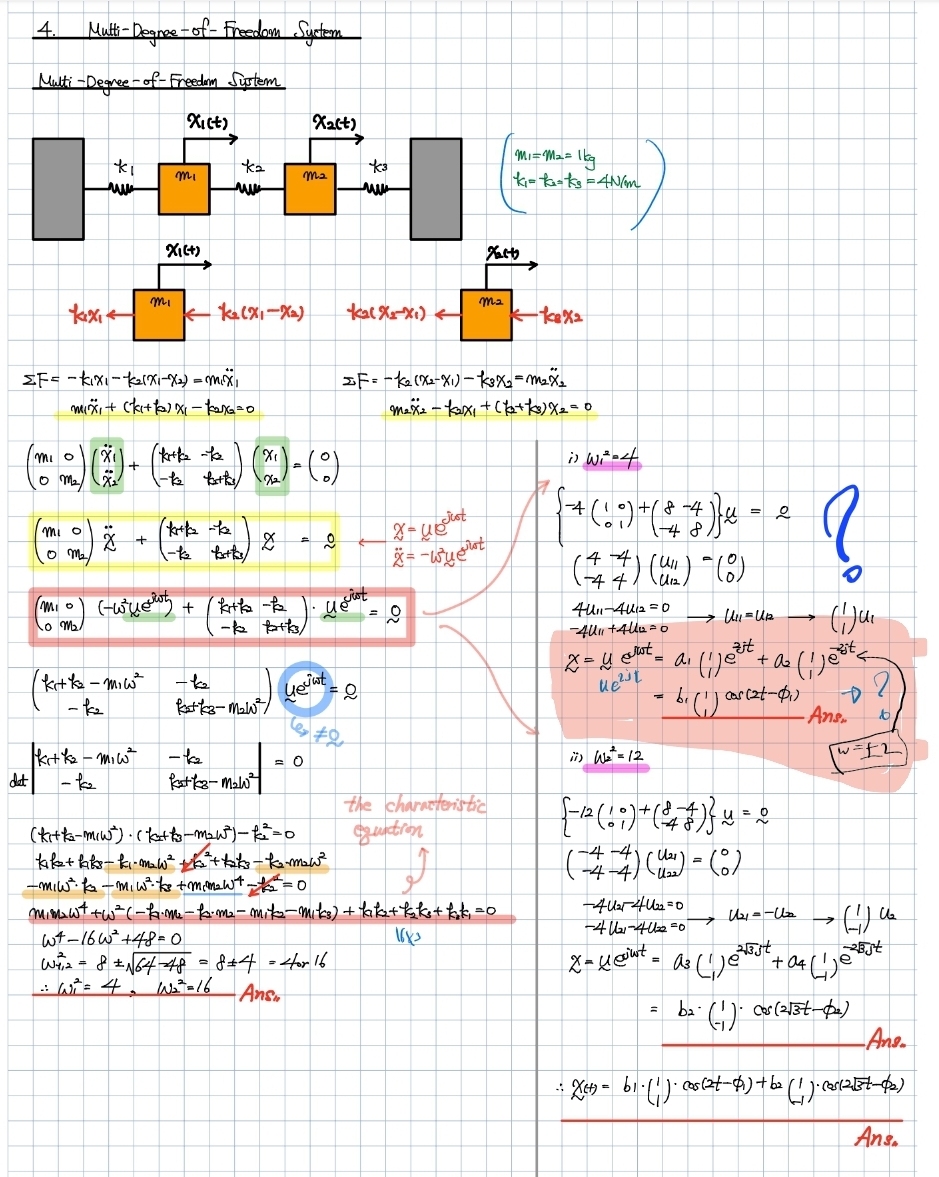
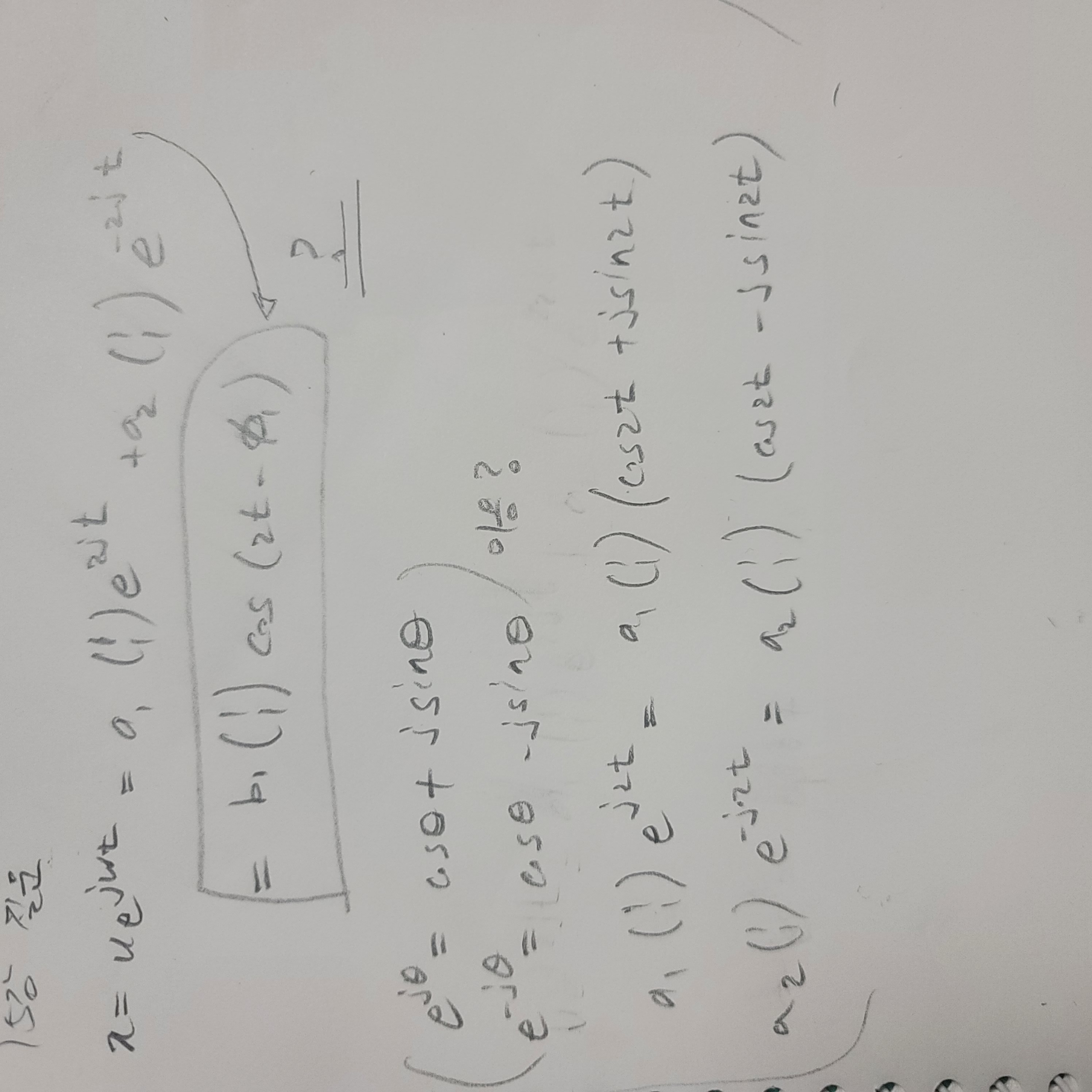
#진동학 #Two-Degree-of-Freedom Model #cos변환 진동학 15강 질문입니다. 마지막 cos함수로 변환되는 과정을 모르겠습니다. 제 풀이에도 나와있듯이, e^(j*theta)를 sin과 cos함수의 합으로 변환하려했으나, 도저히 하나로 합칠 수가 없어 질문드립니다 답변 완료된 질문과 답변은 수정 및 삭제가 불가합니다. |
|||
- 댓글
- 0
아래에서는, 흔히 쓰이는 복소지수 형태(Exponential form) 해를 “하나의 코사인 함수”로 변환하는 과정을 가능한 한 자세히 풀어서 보여드리겠습니다.
──
1. 문제 상황 정리
──
■ 우리가 다루고자 하는 일반적인 해의 형태:
x(t) = C₁ e^(jωt) + C₂ e^(-jωt)
■ 또는 다음과 같은 실수부(real part)로 표현된 형태:
x(t) = Re{C e^(j(ωt + α))}
= Re{|C| e^(jα) e^(jωt)}
= |C| cos(ωt + α)
■ 최종 목표:
x(t)을 하나의 코사인 함수(진폭과 위상을 갖는 형태)로 나타내기
→ x(t) = A cos(ωt + φ)
──
2. 기본 복소수 지수식과 삼각함수 사이의 관계
──
1) 지수함수와 코사인/사인
e^(jθ) = cos θ + j sin θ
e^(-jθ) = cos θ - j sin θ
2) 코사인과 복소지수
cos θ = ( e^(jθ) + e^(-jθ) ) / 2
sin θ = ( e^(jθ) - e^(-jθ) ) / (2j)
즉, “복소 지수 2개”의 합은 “코사인 형태”가 된다는 것이 핵심입니다.
──
3. x(t) = C₁ e^(jωt) + C₂ e^(-jωt) → A cos(ωt + φ) 로 변환
──
(1) C₁과 C₂를 일반적인 복소수 형태로 쓰기
C₁ = |C₁| e^(jθ₁), C₂ = |C₂| e^(jθ₂)
(여기서 |C₁|, |C₂|는 복소수의 크기(실수), θ₁, θ₂는 위상각)
x(t)를 다시 쓰면
x(t)
= |C₁| e^(jθ₁) e^(jωt) + |C₂| e^(jθ₂) e^(-jωt)
= |C₁| e^(j(ωt + θ₁)) + |C₂| e^(j(-ωt + θ₂))
(2) 실수 해를 가정했을 때(대부분의 진동문제에서는 x(t)가 실수)
보통 진동 문제에서 해 x(t)는 실제값이므로, C₁와 C₂가 서로 켤레복소수 관계( C₂ = C₁* )가 되도록 상정합니다.
예: C₁ = (A/2) e^(jφ), C₂ = (A/2) e^(-jφ) (이때 A는 실수, φ는 위상)
이렇게 두면
x(t)
= (A/2)e^(jφ) e^(jωt) + (A/2)e^(-jφ) e^(-jωt)
--------------------------------------------
= (A/2) [ e^(j(ωt + φ)) + e^(-j(ωt + φ)) ]
--------------------------------------------
= (A/2) · 2 cos(ωt + φ) (위의 “코사인과 복소지수” 관계 이용)
= A cos(ωt + φ)
이렇게 한 덩어리(A cos(ωt + φ))로 합쳐집니다.
(3) 정리
일반적으로 진동학에서 “복소형 해”를 사용하는 이유는 미분방정식을 풀 때 편리하기 때문입니다(지수함수는 미분/적분 시 형태가 동일).
하지만 최종 해는 ‘물리적으로 실수(real)’가 되어야 합니다.
따라서 결과적으로 e^(jωt)와 e^(-jωt)의 합이 “하나의 cos”(또는 sin)으로 표현 가능하다는 점을 이용합니다.
──
4. x(t) = Re{C e^(j(ωt + α))} → |C| cos(ωt + α) 로 이해하기
──
(1) x(t)를 Re{ … } 형태로 쓰면
x(t) = Re{ C e^(j(ωt + α)) }
= Re{ |C| e^(jα) e^(jωt) } (여기서 C = |C| e^(jα) 로 분해)
(2) e^(j(ωt + α)) = e^(jα) e^(jωt)를 전개
e^(j(ωt + α)) = cos(ωt + α) + j sin(ωt + α)
(3) “실수부”만 취하면
Re{ |C| e^(jα) e^(jωt) }
= |C| · Re{ e^(j(α + ωt)) }
= |C| · cos(ωt + α)
결국,
x(t) = |C| cos(ωt + α)
──
5. 직접 전개 예시(한 번 더 풀어보기)
──
• 가장 원초적으로 다음을 전개해 보겠습니다.
x(t) = Re{ C e^(j(ωt + α)) }
= Re{ |C| e^(jα) (cos(ωt) + j sin(ωt)) } (단순 전개)
e^(jα) = cos α + j sin α 라고 두면,
C = |C| e^(jα) = |C|(cos α + j sin α)
⇒ C e^(jωt) = |C|(cos α + j sin α) [cos(ωt) + j sin(ωt)]
이제 실수부만 모아서 정리해봅시다:
(cos α + j sin α)(cos ωt + j sin ωt)
= (cos α · cos ωt) + (cos α · j sin ωt)
+ (j sin α · cos ωt) + (j sin α · j sin ωt)
= cos α cos ωt + j cos α sin ωt
+ j sin α cos ωt + (j·j) sin α sin ωt
여기서 (j·j) = j² = -1 이므로
= cos α cos ωt + j cos α sin ωt
+ j sin α cos ωt – sin α sin ωt
실수부만 보면
= cos α cos ωt – sin α sin ωt
= cos(ωt + α) (삼각함수의 합성 공식)
따라서,
Re{C e^(jωt)} = |C| [cos α cos ωt – sin α sin ωt ] = |C| cos(ωt + α)
──
6. 요약
──
1) 복소지수 해 x(t) = C₁ e^(jωt) + C₂ e^(-jωt)는,
C₁과 C₂가 적절한 켤레관계를 이룬다면(실수 해를 위해),
하나의 코사인(또는 사인) 함수로 합쳐진다.
2) x(t) = Re{C e^(j(ωt + α))}가 |C| cos(ωt + α)가 되는 이유는,
e^(jθ)의 실수부가 cos θ 이기 때문이고,
C = |C|e^(jα) 같은 크기·위상을 갖는 복소수의 곱에서 실수부만 추려내면
결국 “크기(진폭) × 코사인(위상의 합)” 꼴이 되기 때문이다.
3) 이런 과정을 진동학(또는 회로이론 등)에서 즐겨 쓰는 이유는,
복소지수를 사용하면 선형 미분방정식을 풀 때 훨씬 간단해지고,
최종 물리적 해는 실수부만 취해도 충분하기 때문이다.
위 과정을 차근차근 따라가 보시면,
“복소지수의 합 → 삼각함수 형태(코사인 혹은 사인)”로 바뀌는 과정을
이해하실 수 있을 것입니다. 필요하신 다른 부분이 있으면 언제든 질문 주세요!
- 2025-02-21













{kind=link}
{kind=link}